Our research projects
Collaborative research projects

Context aware real time motion planning for autonomous vehicles (CAR.MOVE)
Prof Johannes Betz, Technical University of Munich
This project aims to develop a real-time capable trajectory planner that enables safety-critical maneuvers in autonomous vehicles. The planner is integrated into an autonomous driving system using the microservice architecture framework, prioritizing optimization for resource distribution, latency and energy consumption on automotive-grade compute hardware. Additionally, the project investigates the concept of a “safety supervisor” to provide safety guarantees to mixed critical systems.
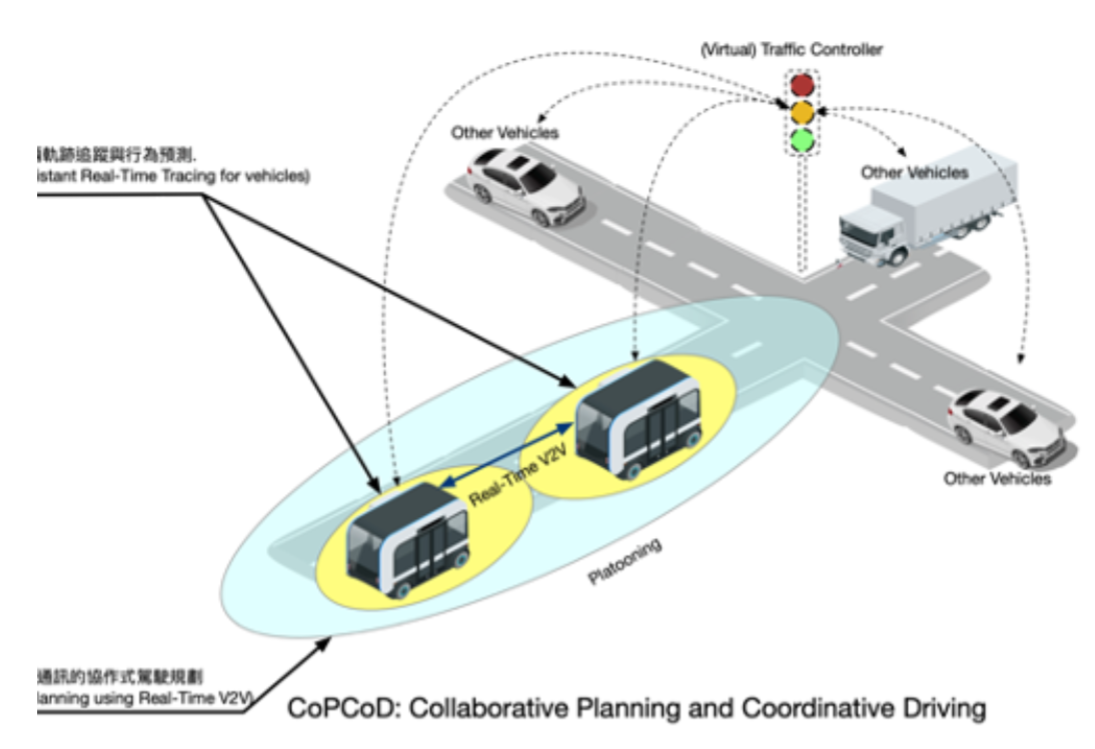
V2X network and real-time messaging for distributed collaborative consensus for vehicle platooning
Prof Chi-Sheng Shih, National Taiwan University
This research focuses on developing collaborative perception and planning algorithms for vehicle platooning. The research investigates how collaborative perception can improve perception performance through augmenting training data, and how distributed consensus algorithms can enable collaborative planning. These algorithms are enabled by lightweight peer-to-peer network communications, which are experimentally investigated to understand their characteristics. The algorithms and the connected infrastructure framework are implemented, deployed and certified in the real world.

C-V2X for Autoware.Universe
Prof Weisong Shi, University of Delaware
This project proposes a framework using C-V2X technology to establish connections between infrastructure and vehicles, as well as between vehicles themselves to transmit safety-critical information and to provide additional safety redundancies. By enabling these communication channels, the project connects previously independent single-agent vehicles with existing infrastructure. This framework can overcome the sensing and processing limitations inherent in single-agent autonomous systems. Specifically, the project introduces OpenIntersection, an open standard designed for implementing such a framework, and has led to the development of a reduced-scale Indoor Connected and Autonomous Testbed (ICAT).
TIER IV research activity

Research on system software specialized for robot applications
High levels of safety are required for advanced robots, including autonomous driving systems, to gain public acceptance. In order to meet these safety requirements, it is necessary not only to have functional safety such as obstacle detection, but also to ensure that the system can provide sufficient computational performance to ensure functional safety, and that the performance is predictable. However, our analysis shows that software running on existing OS such as Linux or middleware such as ROS2 is greatly influenced by the underlying system software, and as a result, the computational performance under specific conditions may be affected. It was found that deterioration and inhibition of predictability occur.

Improving predictability for heavy-duty embedded real-time application
In conventional embedded hard real-time systems, schedulability is guaranteed based on real-time scheduling theory after analyzing the worst-case execution time of tasks. However, in high-load applications such as autonomous driving, in order to achieve high throughput, it is necessary to select a multi-core environment where the worst-case execution time is not defined. Additionally, competition for shared resources such as cache, memory bus and hyperthreading causes spikes in the execution time of each task. Furthermore, in autonomous driving applications, the amount of data from external sensors is dynamic, and the load pattern on the entire system is complex. For such workloads and platforms, it is impossible to guarantee that real-time constraints will be met using a combination of traditional worst-case execution time and schedulability analysis. Therefore, in this research, based on a best-effort platform, we will research functions that improve "predictability" including the possibility of achieving time constraints, and methods for evaluating them. Specifically, our research focuses on the evaluation and mitigation of various types of resource contention, user-definable application-specific schedulers, and frequency/power-aware schedulers.

Safety-verification oriented bi-directional perception-planning framework
The objective of this research project is to realize a safe and efficient autonomous driving system framework. Autonomous vehicles rely on sensors to detect obstacles and avoid collisions. While the typical planning methods use detected obstacle information to find a safe path to the destination, sensors have limitations in detecting obstacles, and these sensing limitations directly affect the safety of planning results. In contrast, the proposed planner in this research utilizes safety-verified regions to determine the path. In this method, the planner uses sensors to verify safe regions to traverse, ensuring that sensing limitations do not lead to risky situations. Additionally, this research uses a bi-directional perception-planning framework that reduces unnecessary perception and enables efficient computation by sharing planning information with perception modules.
Past projects
-
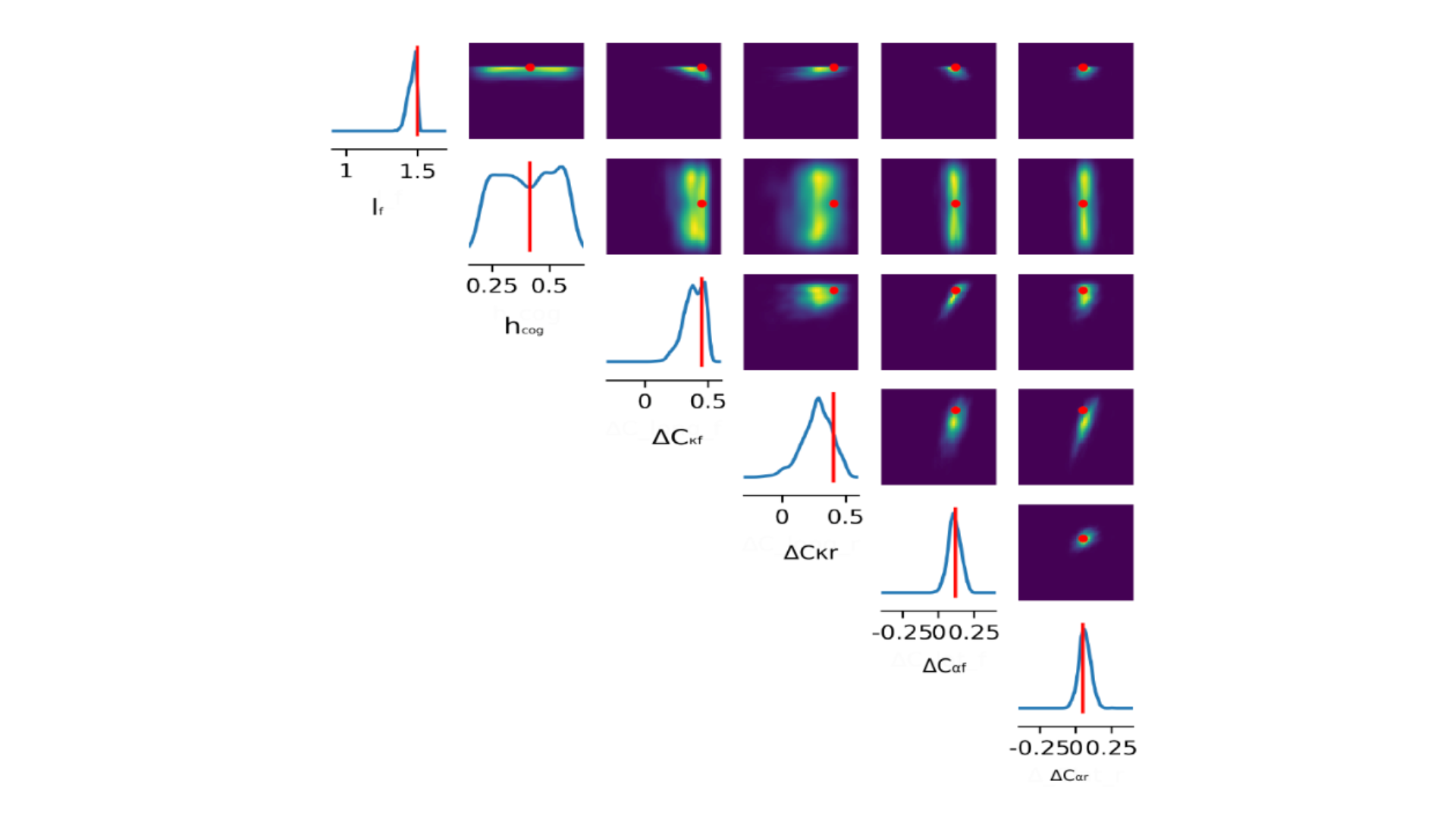
System identification of vehicle dynamics using density estimators and simulation based inference
-

Successive convexification and state triggered constraints for autonomous vehicle planning and control
-

Learning a model for inferring a spatial road lane network graph using self-supervision